



The project commenced with comprehensive research, including literature reviews, case studies, and field observations, to understand the unique challenges in conservation feeding practices as well as the injection of technology in such environments
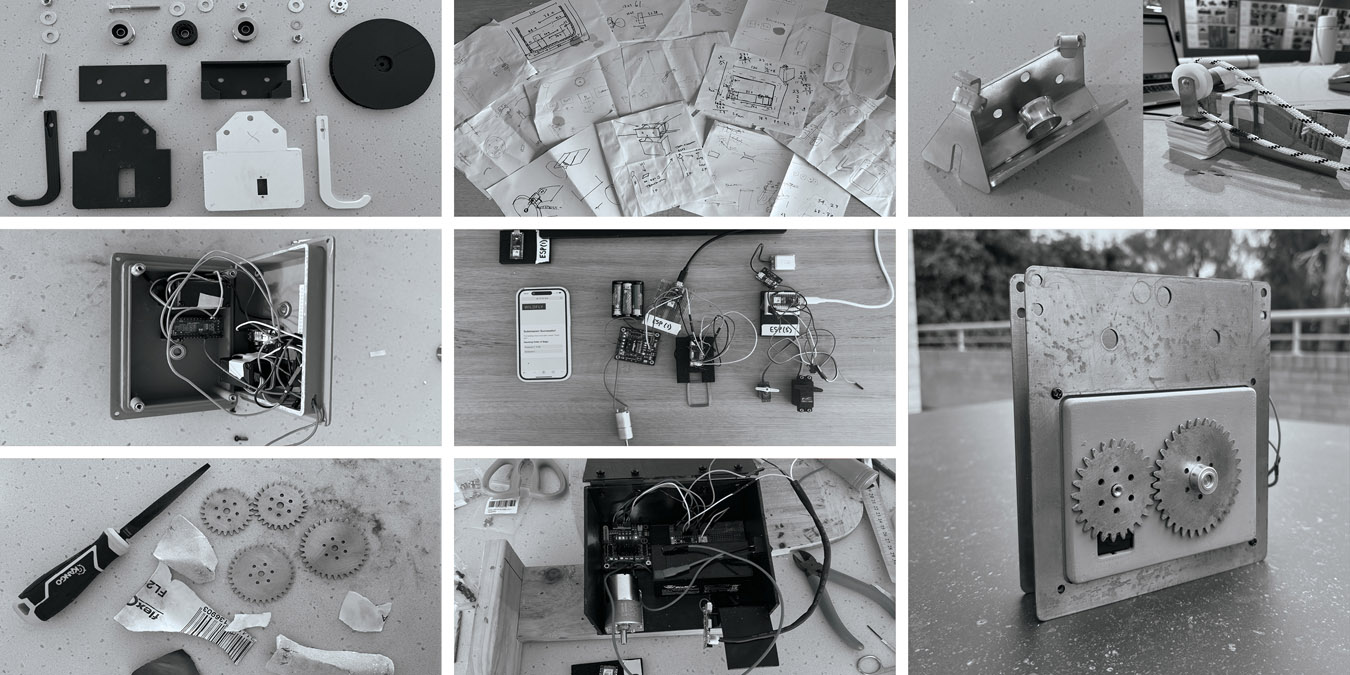
Using the Design Council’s double diamond framework, the project progressed through discovery, definition, development, and delivery phases involving Mind Mapping and Sketch Ideation: Brainstorming sessions and sketches to conceptualise various design solutions. Rapid Prototyping and Electronic Prototyping: Developing and testing prototypes to refine the design and ensure technical feasibility.
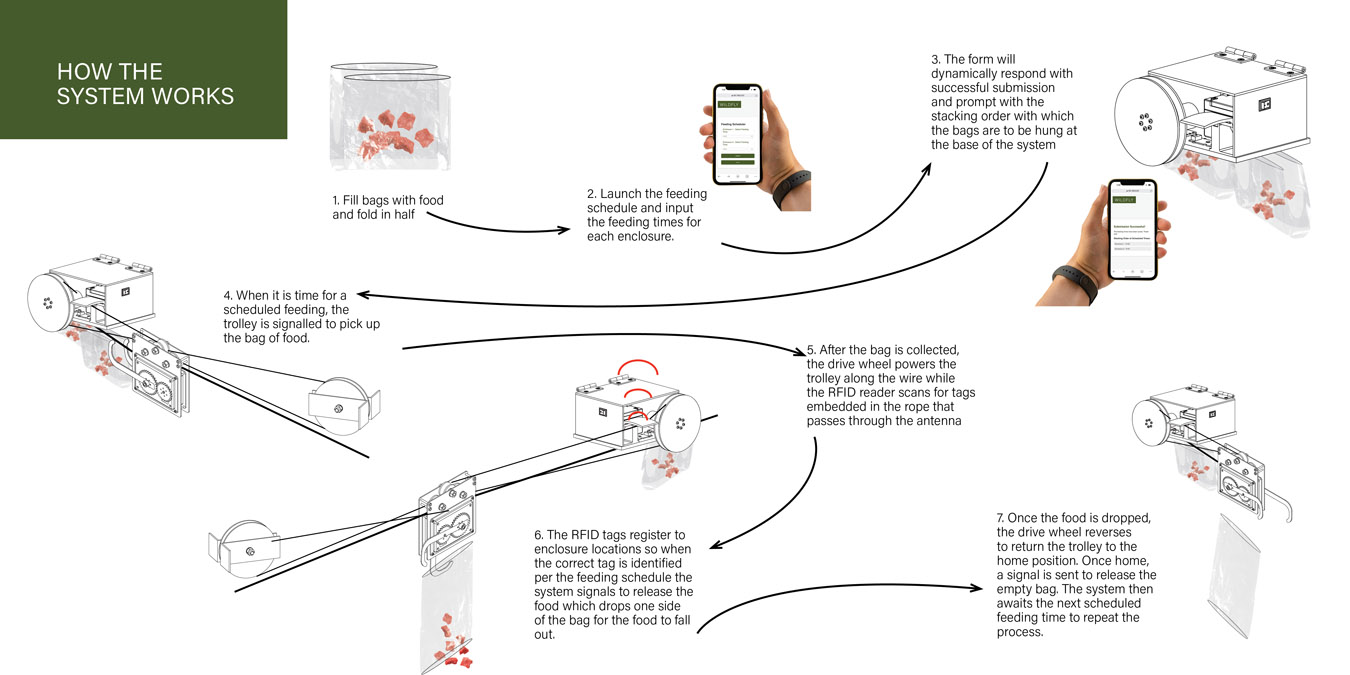
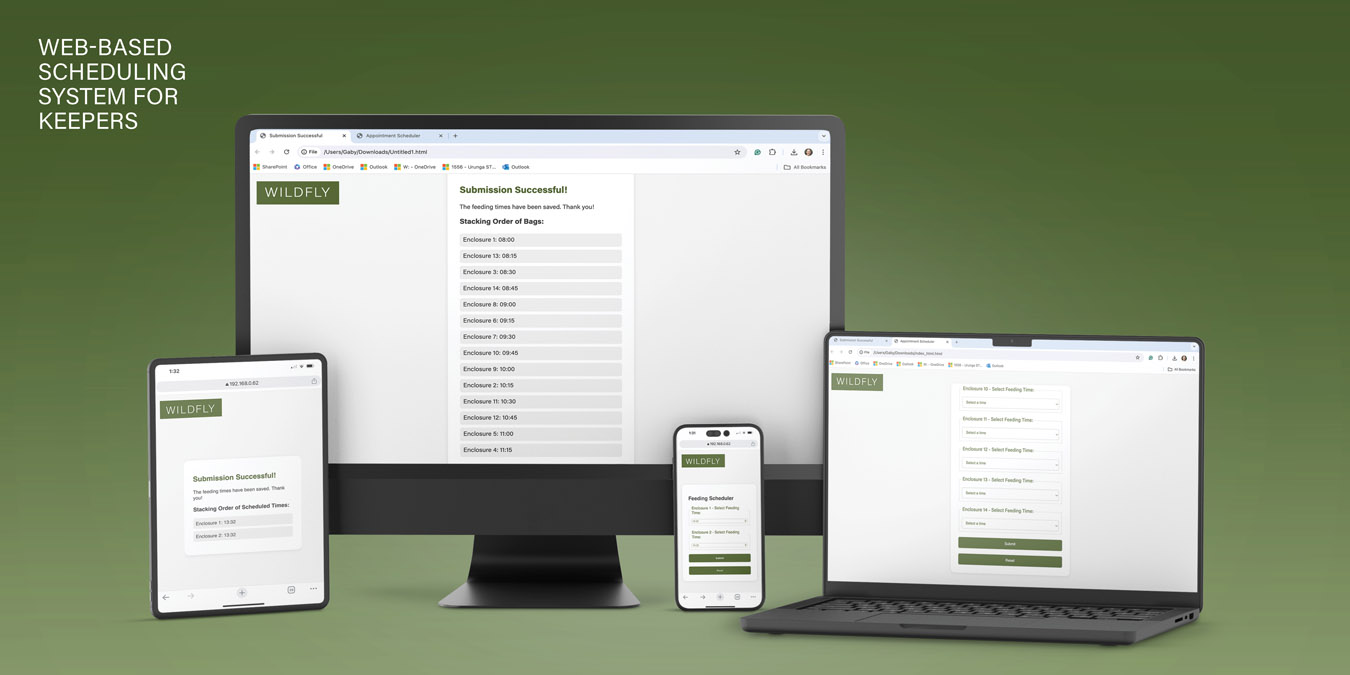
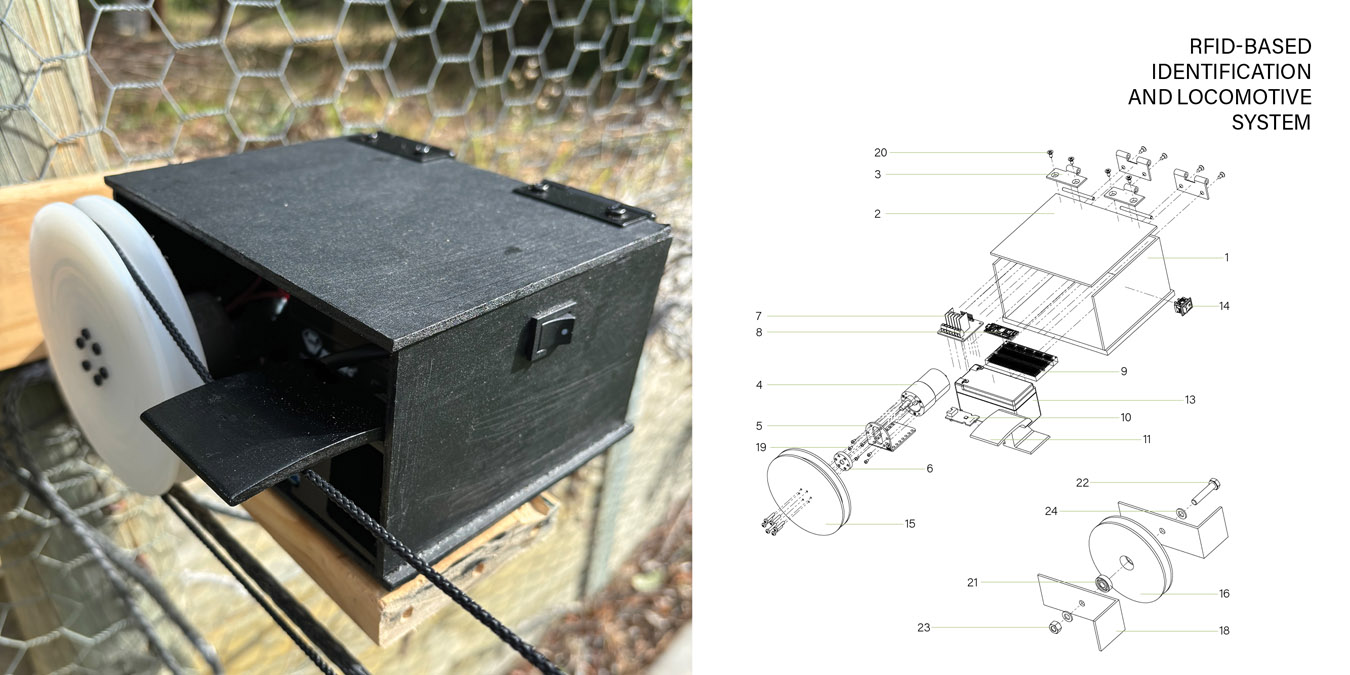
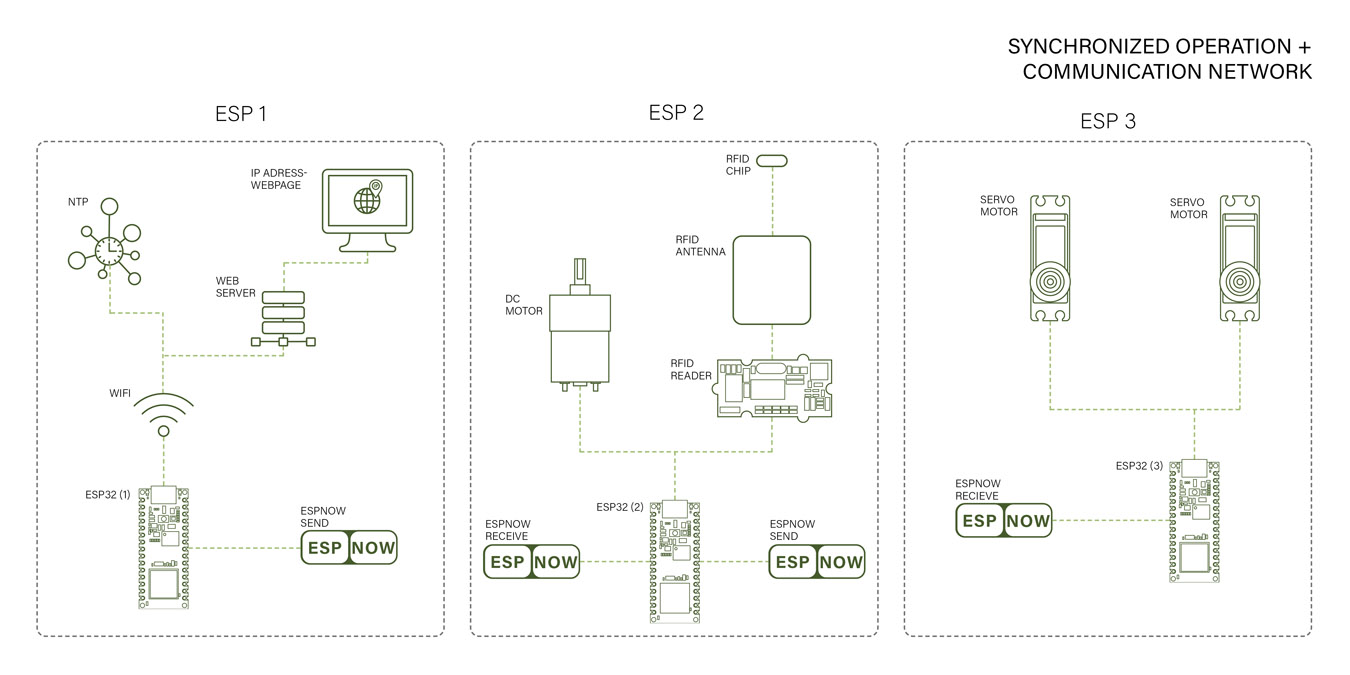
After the initial design realisation phase I further developed four key components to meet the briefs requirements: Web-Based Scheduling System: Developed a custom HTML interface for keepers to manage feeding schedules. The system dynamically updates and ensures no overlap, providing a user-friendly and efficient scheduling tool. Synchronised electronic network: Utilized 3x ESP32 microcontrollers for robust communication. With one master hosting the web server and managing overall synchronisation, with 2 slaves handling locomotion, RFID processing and servo functions, ensuring precise control and low latency. RFID-Based Identification and Locomotive System: Implemented RFID tags to accurately identify enclosures, as DC motor drives system movement along the high wire to deliver meals to specified enclosures as scheduled.
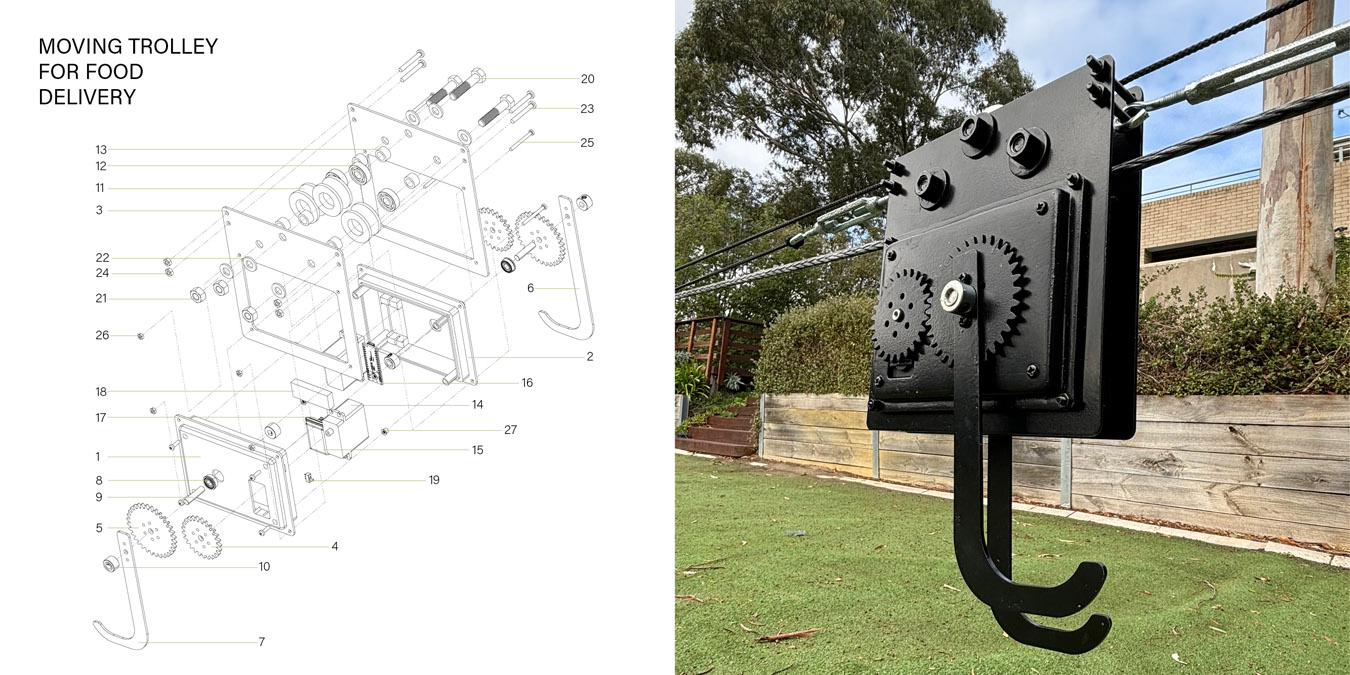
Moving Trolley for Food Delivery: Designed a trolley with high-torque servos and gears for food pick-up, transport, and drop-off. The final design was assembled and tested in a simulated environment. The web interface was seamlessly integrated with the hardware, and the communication protocols were validated. The system demonstrated reliable performance in delivering meals accurately and efficiently, with further refinement planned for consistent operation.
The project met the design brief by delivering a robust and innovative solution demonstrating a high level of professional design execution, resulting in a system that effectively automates feeding practice.